浅析并查集的实现与应用
从离散数学中不相交集合的概念引入,介绍并查集的概念与其Union与Find操作的实现,以及并查集的应用
浅析并查集的实现与应用
一、关于并查集
1.1 不相交集合
- 回忆离散数学中的关系(Relation)章节中的等价关系(Equivalence Relation)相关概念
- 等价关系即同时满足自反性、对称性、传递性的关系
- 一个等价关系会将一个集合$A$分区为多个互不相交的等价类(Equivalence Class)
- 等价类内的元素称为该等价类的代表(Representative),它们互为等价元素
- 这些等价类由于其不相交性,也被称为不相交集合(Disjoint Set),而被分区为若干个不相交集合的集合$A$被称为并查集(DSU, Disjoint Set Union)
1.2 并查集操作
- 关于并查集,我们常需要对其做以下两种操作
Find:查询$A$的并查集中的某个元素属于哪个不相交集合Union:合并两个不相交集合集为一个新的集合
二、并查集的实现
2.1 逻辑上以树结构理解
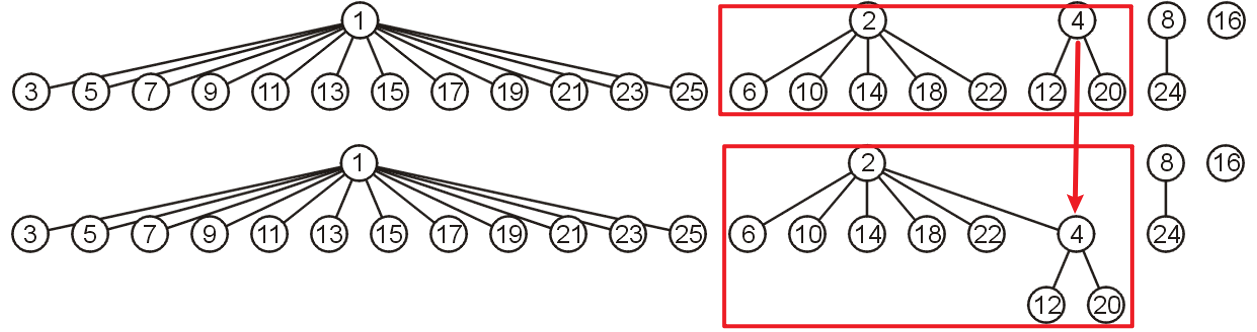
- 通常我们会采用一系列一般树来实现并查集,如下图所示是某个集合$A$中的所有不相交集合树
- 这种实现方法中,集合$A$中的元素以节点的形式存在
- 每个树的所有节点都同属一个不相交集合,根节点可以是其中的任意代表

- 暂不讨论其
Find操作,其Union操作需将其中一棵树的根节点附加到另一棵树的根节点上
2.2 代码中借助数组实现
2.2.1 实现思路
除了下面的方法外,也可以将根节点对应在数组
arr中的元素维护为一个负数,其绝对值表示其所在不相交集合的元素数,而非根节点对应arr中的元素值则使用正数,作为索引指向其父节点
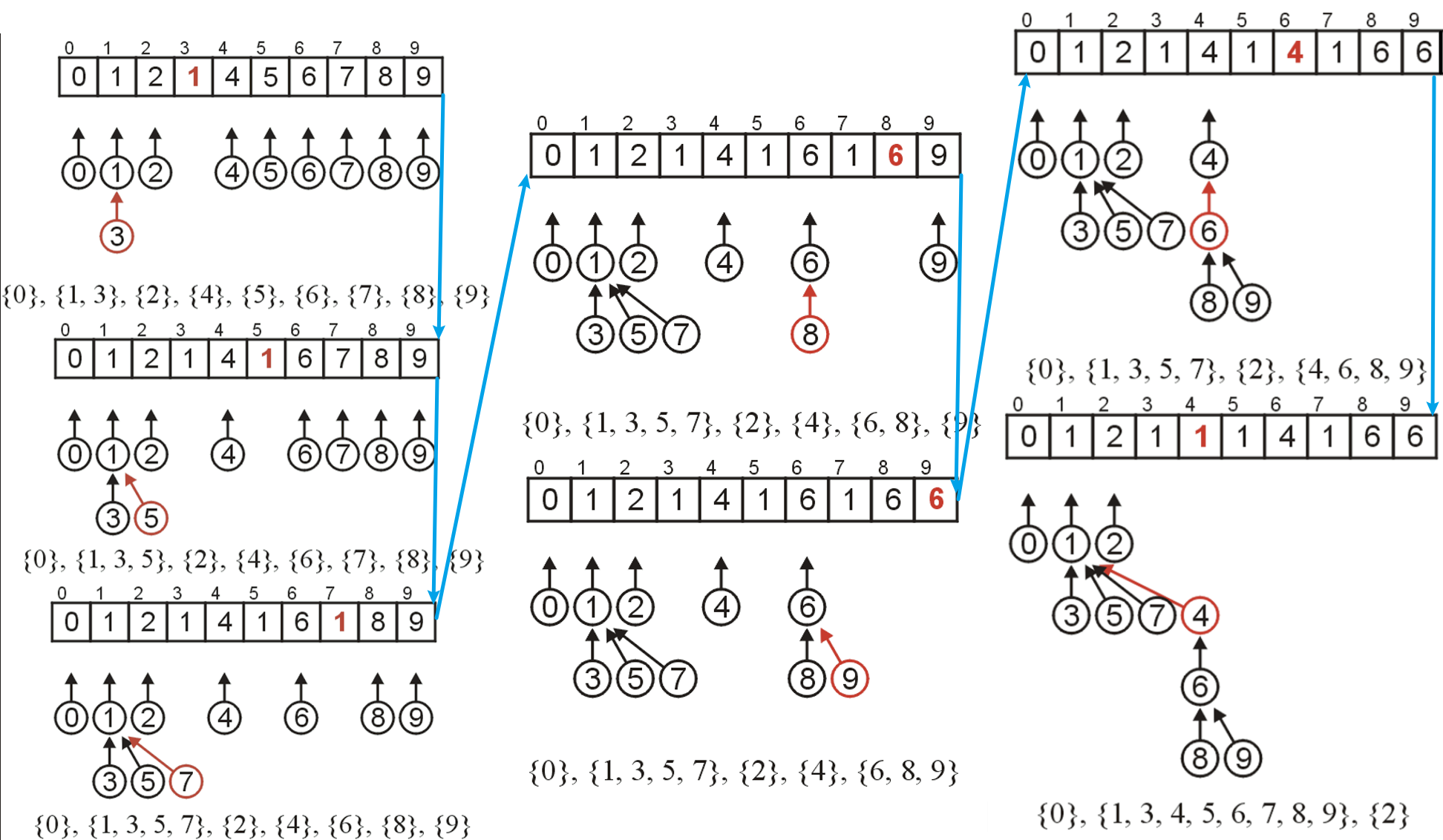
- 我们声明一个长度和元素总数$n$相等的数组
arr(虽然实际存储并查集结构的是数组,但我们可以通过上文讲到的树的结构来进行理解)- 如果索引
i处的元素值等于i的话(即arr[i] == i)则说明该索引处的元素节点是树的根节点,该实现下的并查集中的不相交集合的个数,就等于数组中的arr[i] == i的根节点元素个数,每个根节点唯一确定一个不相交集合 - 如果
arr[i] != i,则arr[i]表示该节点的父节点的索引值,父节点不一定是根节点
- 如果索引
2.2.2 查找操作
- 其
Find操作的实现如下,时间复杂度等于$O(h)$,其中$h$指的是树高
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
//非递归写法
size_t DisjointSetUnion::Find(size_t _idx) const
{
//从数组的_idx处的节点不断向上回溯其父节点,知道回溯到根节点
while(arr[_idx] != _idx)
{
_idx = arr[_idx];
}
//返回找到的根节点的索引,这样我们就算是找到了传入节点所处的等价类了
return _idx;
}
//递归写法(函数调用堆栈使用额外O(h)的空间复杂度)
size_t DisjointSetUnion::Find(size_t _idx) const
{
return arr[x] == x ? x : Find(arr[x]);
}
2.2.3 合并操作
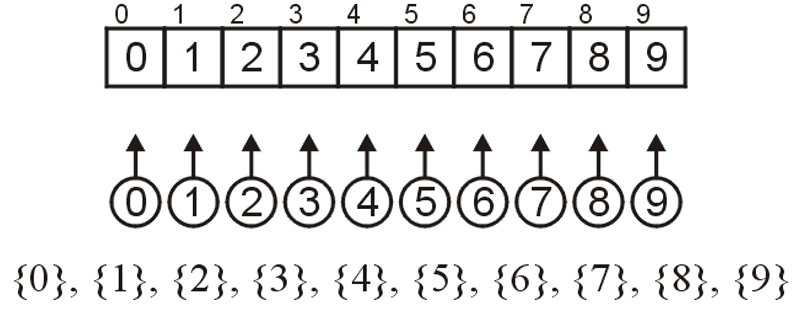
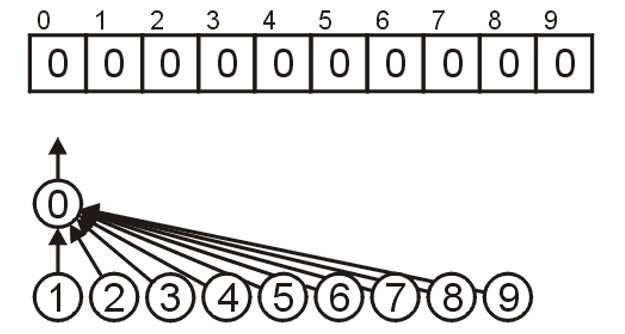
- 我们将数组初始化为离散的$n$个元素(即$n$个不相交集合),如下图所示
- 然后我们若想将合并两个集合,则需知道这两个集合的根节点在数组中的索引,比如
i和j,如果想将前者对应集合合并到后者集合内,则我们只需要将arr[i]的值改为j即可,这 样i节点下的所有子节点在使用Find回溯根节点时就会回溯到j处,这样就完成了合并
- 合并的代码实现如下所示,该函数接收两个索引参数,为了提高鲁棒性我们需要确保二者均为根节点索引,所以时间复杂度为$2\cdot O(h) + O(1) = O(h)$
1
2
3
4
5
6
7
8
9
void DisjointSetUnion::Union(size_t _idx1, size_t _idx2)
{
//确保两个索引处的元素是根节点
_idx1 = Find[_idx1];
_idx2 = Find[_idx2];
//将_idx1所属集合合并到_idx2所属集合上
if (_idx1 != _idx2)
arr[_idx1] = _idx2;
}
2.3 优化时间复杂度
2.3.1 矮树接高树
- 我们从代码实现中可以看出,为了使得
Find和Union时间复杂度最小,则需降低树高h,其中一种思路是将树高较小的树合并到较高树的根节点上 - 该方法最坏情况就是每次合并两个树的高度都相同,这样合并后的树高总会比原先的增高$1$个节点,下图的红色数字表示对应深度的节点数,由此可计算出最坏情况的节点的平均深度为$O(\ln{n})$
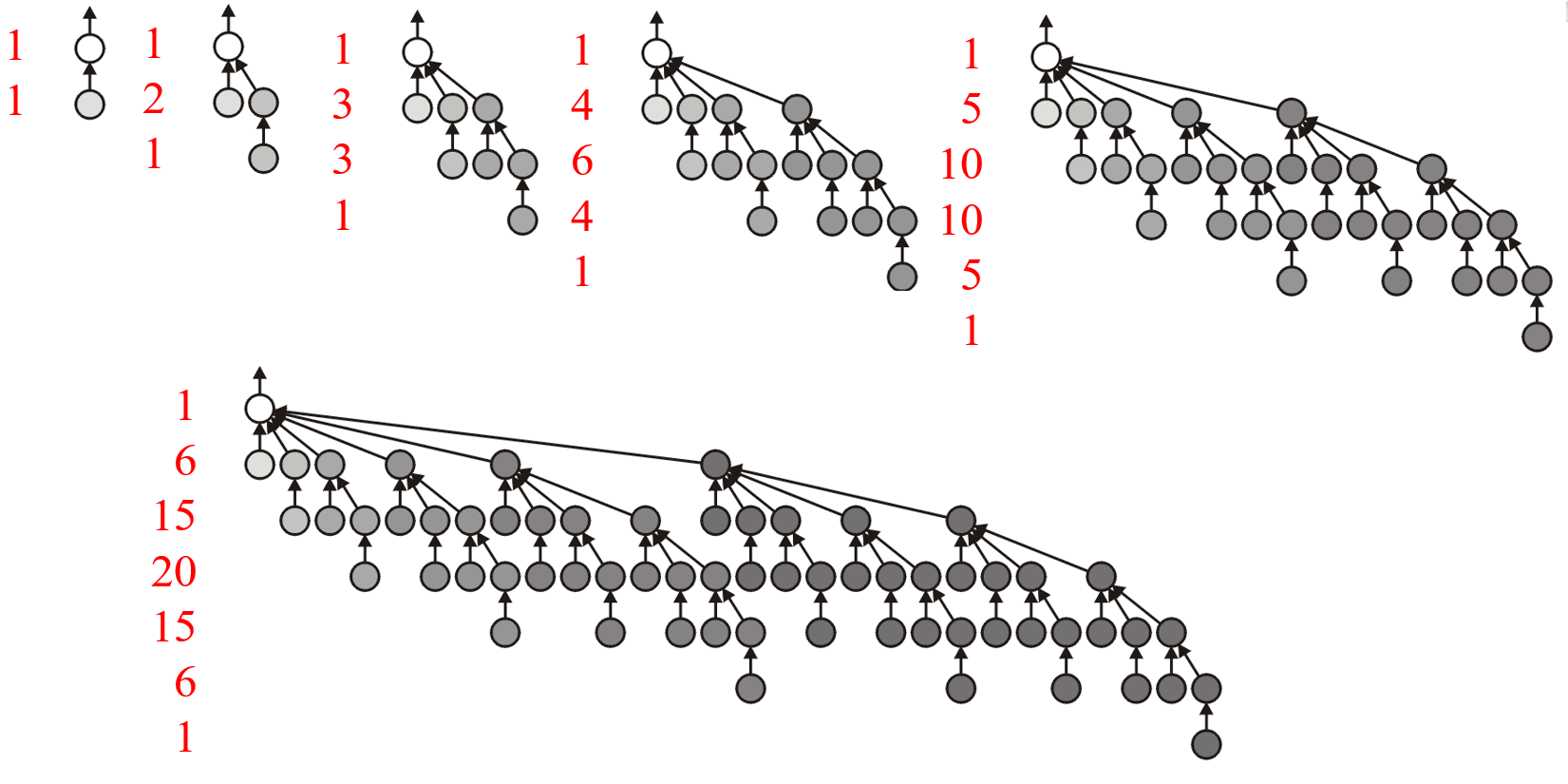
- 最好情况则是如下图,其节点平均深度为$O(1)$
- 平均情况较为复杂,参考此处的解析,平均深度为$\Theta(1)$
2.3.2 路径压缩
- 可以对
Find函数进行路径压缩优化,使得每次调用Find(_i)时,都将_i对应节点(及其与根节点之间路径上的所有节点全部都)改接到其所在不相交集合的根节点上,以确保并查集中的所有树高度维持在$1$ - 我们也可以在每次调用
Union时就将路径压缩,但是Union函数本身就是要调用Find函数的,所以二者并无根本上的区别 - 下面是递归的实现方法,使得下一次
Find(_i)时的时间复杂度降为$O(1)$,但是需要耗费$O(h)$的空间复杂度,因为递归算法会使用函数调用堆栈从而造成空间的开销
1
2
3
4
5
6
7
8
9
10
11
12
//递归的路径压缩优化Find函数
size_t DisjointSetUnion::Find(size_t _i)
{
if (arr[_i] == _i)
return _i;
else
{
//将_i向上寻根的路径上全部的节点都接到根节点上
arr[_i] = Find(arr[_i])
return arr[_i];
}
}
- 当然也可以使用非递归的方式实现,如下所示
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
size_t DisjointSetUnion::Find(size_t _i)
{
//先找到根节点索引
size_t _root = _i;
while (arr[_root] != _root)
_root = arr[_root];
//将路径上所有节点改接到根节点上
while(_i != _root)
{
size_t _temp = arr[_i];
arr[_i] = _root;
_i = _temp;
}
return _root;
}
三、并查集的应用
- 此课件内介绍了DSU被用于图像处理、迷宫生成的两个例子
本文由作者按照 CC BY-NC-SA 4.0 进行授权